|
I am a PhD graduate of HKUST Aerial Robotics Group, supervised by Prof. Shaojie SHEN. During PhD I mainly focused on high-precision and globally consistent SLAM with multiple low-cost sensors. By fusing the information from various low-cost and small-footprint sensors, I aim to design versatile, robust and accurate localization solutions for general spatial-aware applications. |
|
|
I am interested in multi-sensor fusion SLAM, 3D perception, semantic-level scene modelling and understanding in real-world environments. |
|
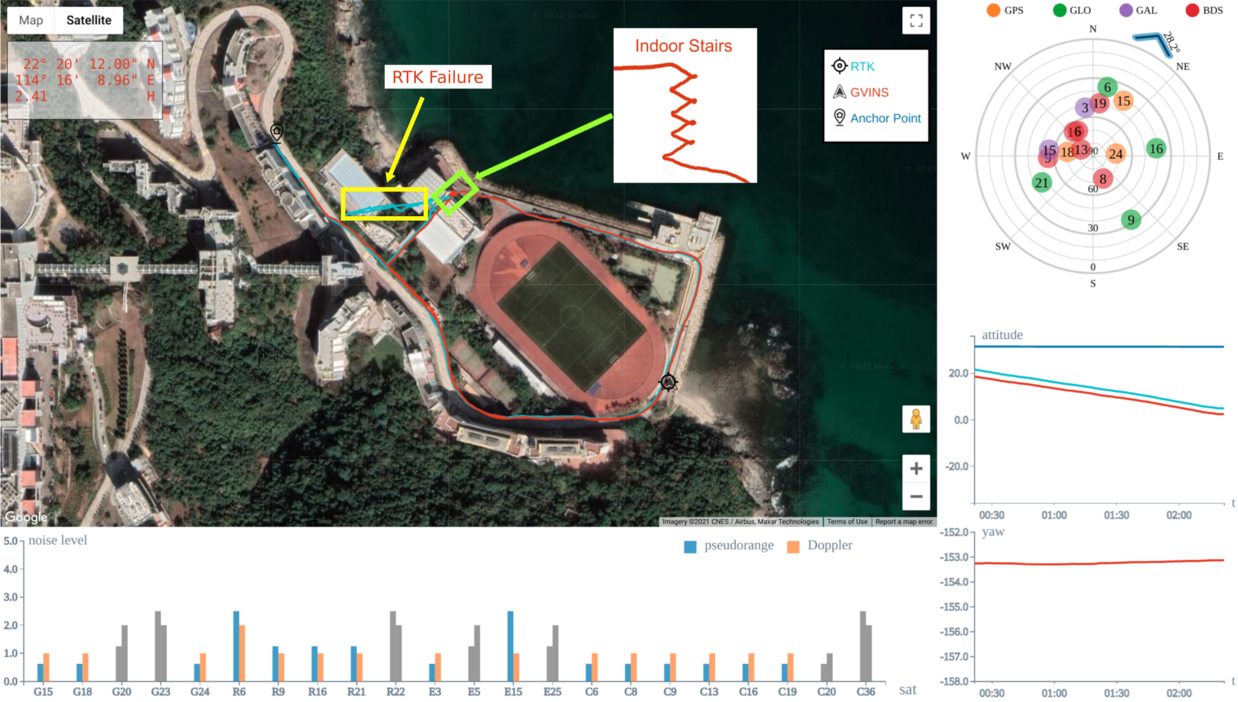
Shaozu Cao, Xiuyuan Lu, Shaojie Shen IEEE Transactions on Robotics (TRO), 2022 paper / video / code GVINS significantly improves the global consistency of the visual-inertial odometry for long-range estimation. |
|
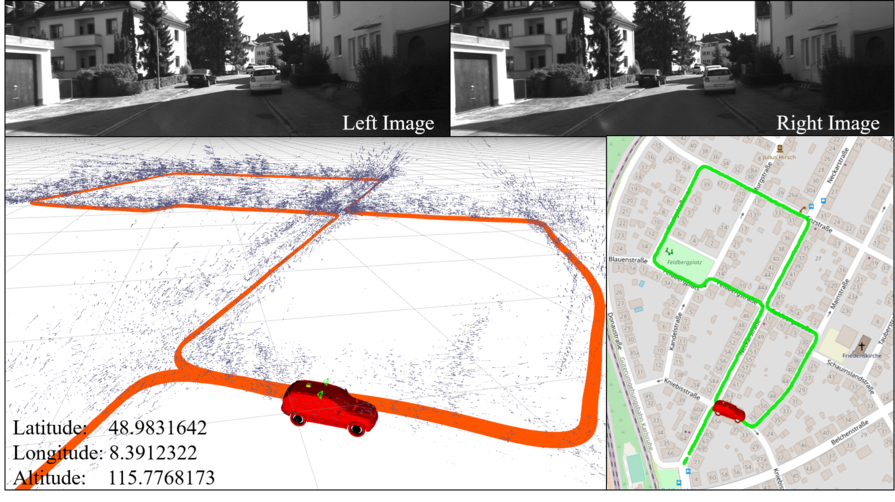
Tong Qin, Shaozu Cao, Jie Pan, Peiliang Li, Shaojie Shen Arxiv, 2019 paper / video / code VINS-Fusion achieves accurate localization for autonomous applications with multiple sensor modelities support. |
|
Tong Qin, Shaozu Cao, Shaojie Shen code A-LOAM is an advanced implementation of LOAM (J. Zhang and S. Singh.), which greatly simplifies the code structure and provides an easy reference for SLAM researchers. |
|
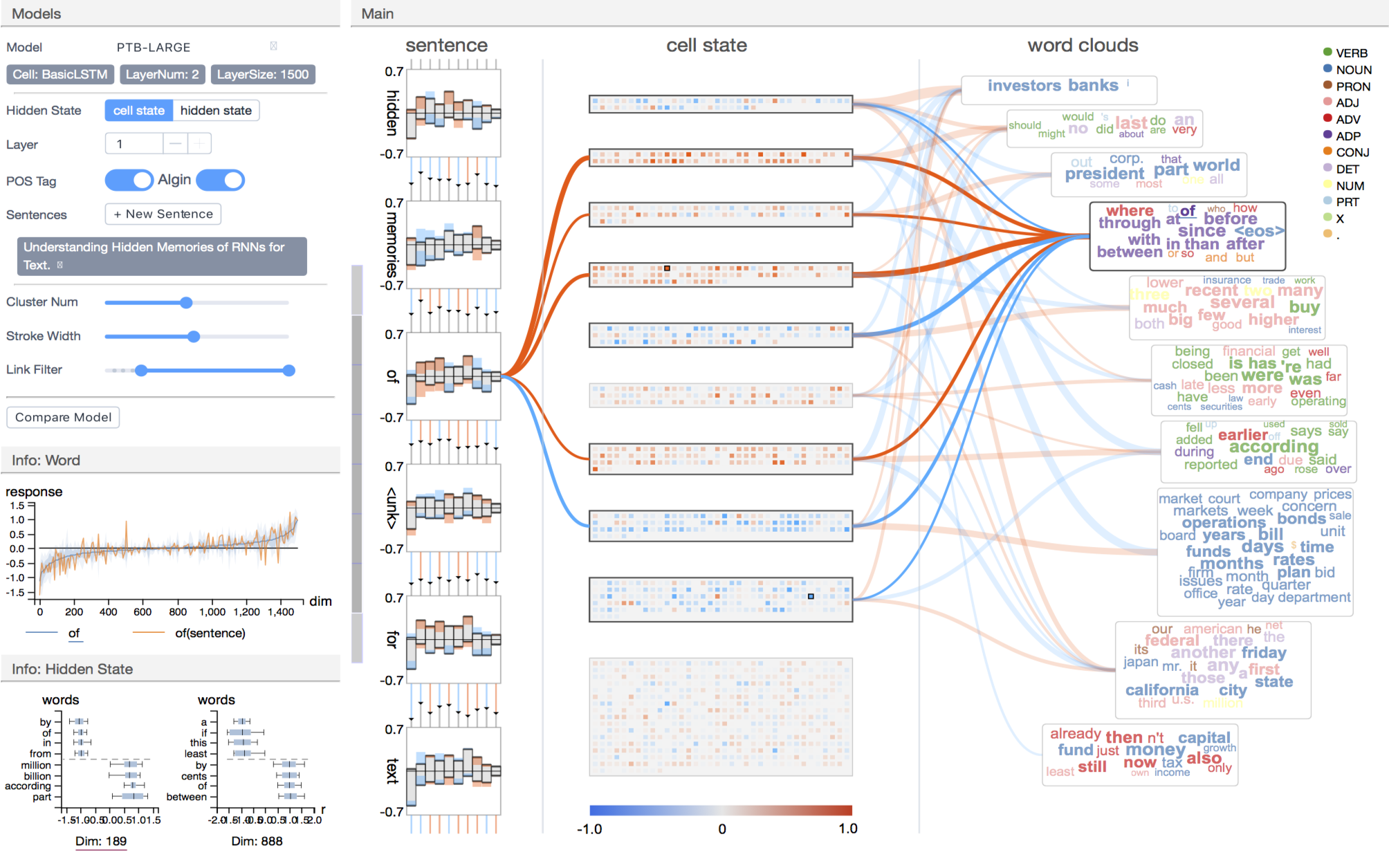
Yao Ming, Shaozu Cao, Ruixiang Zhang Zhen Li Yuanzhe Chen Yangqiu Song Huamin Qu project page / paper / video / code RNNVis enables visual analytics on understanding and comparing recurrent neural networks (RNNs) for text-based applications. |
|
© Copyright 2023 Shaozu CAO
|